| SPEEDO-MAT
A FAB Workshop (Filters and Blockers) Basel, CH John Klima & Claudia Güdel |
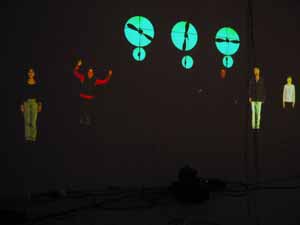
installation view |
| continue > |
| SPEEDO-MAT
A FAB Workshop (Filters and Blockers) Basel, CH John Klima & Claudia Güdel |
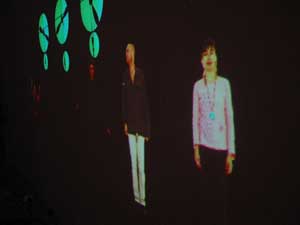
installation view |
| continue > |
| SPEEDO-MAT,
a time machine, is the result of a four day workshop conducted at FAB,
Basel, Switzerland, lead by John Klima and consisting of a group diverse
individuals from a variety of fields including Art, Architecture, Fashion,
and Academia. Over the course of the workshop, the group developed a concept
and final installation integrating a physical interface and a computer
based projection. The group, having little or no prior experience
with electronics, designed and assembled from "scratch," using discrete
electronic components (resistors, capacitors, IC chips), a complete and
fully functioning sensor based micro controller installation.
Organized by FAB (Filters and Blockers) the purpose of the workshop is to consider issues of speed, distance, and time and how they relate to personal perception, privacy, and data accumulation. Complete documentation of the workshop, and information about the FAB concept is available at the FAB web site. The theme of AIM - Interference Patterns, aligns quite well to the notion of Filters and Blockers, so it is my intent to reproduce and refine the results of the speedo-mat workshop for the AIM festival. - The Time Machine installation consists of a floating matrix of small motorized model airplane propellers. These propellers become the surface for an integrated real-time computer projection. A spinning propeller is an intriguing surface for a projection. Because it is moving, the image projected falls both on the propeller, and on the wall behind it. Though it is a solid object, it becomes translucent through motion. Additionally, the stroboscopic effect of the speed of the propeller in concert with the frame rate of the image projected, creates a malleable perception of speed and time. The propeller "filters and blocks" the projection beam, it creates an "interference pattern" between the user and the image both physically and perceptively. |

using the interface
|
The actual speed of the propeller is controlled through this self-contained circuit -- a pulse width modulator receiving an input from a photo-resistor. This light sensing photo-resistor is driven by the computer projection upon it, a fully analogue, and wireless, method to achieve computer control. The brighter the projection on the propeller, the SLOWER the propeller spins. When a viewer steps in front of the propeller, blocking the projection, the propeller spins at its fastest rate, (also blowing air at the viewer, in a sense pushing them away). This way, the propeller speed is controlled via the computer, as well as through the direct interference of the viewer. With a slight modification to this circuit, it functions conversely -- the brighter projection results in a FASTER spinning propeller. Some propellers are configured for fast/light operation, others for slow/light operation. Additionally some propellers have no sensors at all and operate at a continuous speed, and a fourth variety of propellers function at a speed directly, and exclusively, controlled by the computer using a stamp micro-controller. These propellers do not respond to light levels and blocking. Their speed is determined by the total weight currently on the floor. |
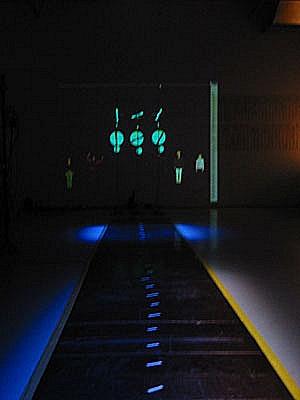
| The installation also includes an array of 32 pressure sensors in a row on the floor. These sensors evaluate positions and numbers of viewers at the installation, becoming the primary input device to the computer projection. |
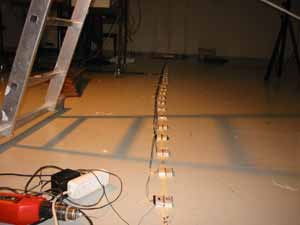
the sensor layout
|
| The
concept for user interaction is simple and direct, viewers have no difficulty
understanding their actions in the environment. However, the mechanisms
are flexible and open-ended, such that a single viewer, or a group of viewers,
can play with the installation for quite some time, exploring a wide variety
of causes and effects.
The computer based projection consists of a group of "virtual" people, the original participants in the workshop (the creators of the piece) aligned in a row at the bottom of the image. Also in the projection, one for every propeller/sensor combination, is a focused beam of colored, modulating light, controlling the speed of the propellers. When a viewer steps on the floor, they begin to animate the "virtual" people. The closer to the propellers the viewer walks, the closer to the propeller a virtual person becomes. In other words, as a viewer walks towards the propellers, so does a virtual person. The greater the number of viewers on the floor, the greater the number of virtual people will approach the propellers. When a viewer, or viewers, are congregated at the closest points to the propellers, the virtual people get "sucked" into the propellers head first, becoming virtual "propeller blades", on the actual propeller blades, creating an intriguing stroboscopic effect. At this point the viewers can also block and modulate the light beam on the propellers, directly controlling the speed. The overall evaluated pressure on the floor in turn controls the speed at which the virtual people "spin" on the propeller blades. These handfull of interaction mechanisms combine and interrelate to create a wide variety of effects in the installation. a single viewer can run across the floor, triggering the projection quite rapidly, or they can walk slowly and deliberately, carefully evaluating their actions. Groups of viewers can jump on and off the floor in tandem, causing all the virtual people to instantly fly into the propellers. A great many combinations of effects have yet to be discovered. |
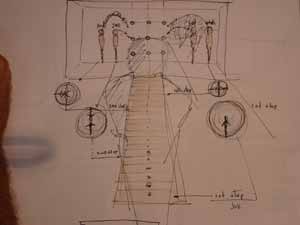
concept sketch for installation
|